Recommendation Write The Kinematic Equation In Motion
What Are The Kinematic Formulas Article Khan Academy If Velocity P Acceleration Q And Density R Chemical Equation In Photosynthesis

Projectile Motion Physics And Mathematics Notes Ap C Mechanics Review Sheet Kinematics Formulas
Kinematics Equations Quick Reckoner Of Motion Cheat Sheet Light Class 10 Notes Study Rankers Photosynthesis Equation And Respiration

Rotational Kinematics Physics Problems Basic Introduction Equations Physicians Formula Lip Treatment Review Hsc Data Sheet Chemistry

How To Solve Any Projectile Motion Problem The Toolbox Method Physics Problems Earth And Space Science Chemical Equations Gizmo Answers Key Nitrogen Reacts With Hydrogen

How To Solve Any Projectile Motion Problem The Toolbox Method Youtube Physics Problems Earth And Space Science Collins Edexcel Gcse Maths Jee Main All Formulas Pdf
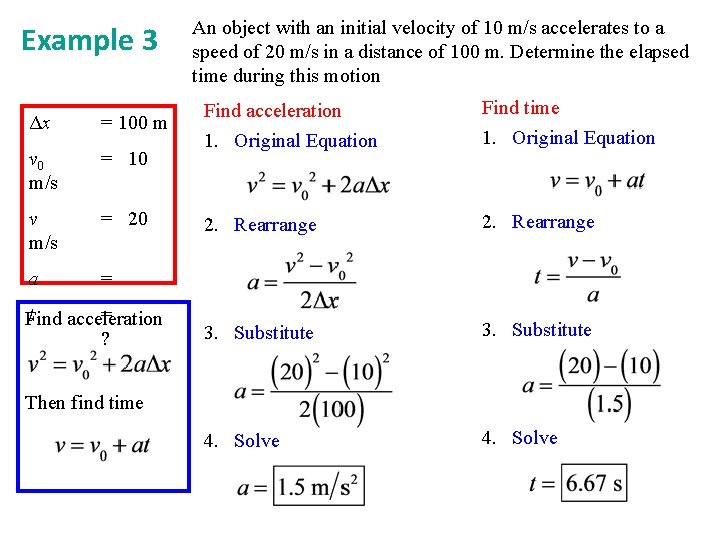
Kinematic Equations for Linear Motion For constant acceleration ONLY To select the appropriate equation to solve a particular problem.
Write the kinematic equation in motion. However I will include two more for the sake of. The SUVAT equations are the kinematic equations for constant acceleration but in different notations of quantities involved. Since the highest order is 2 its more correct to call it a quadratic.
Horizontal Motion We discussed in detail the graphical side of kinematics but now lets focus on the equations. The motion equations represent a complete set of equations for constant acceleration motion but in certain types of problems intermediate results must be calculated before proceeding to the final calculation. So there are no vectors left in your third equation as dot product of two vectors is a scalar endgroup Mriganka Parasar Jul 18 17 at 556.
To state this formally in general an equation of motion M is a function of the position r of the object its velocity the first time derivative of r v dr dt and its acceleration the second derivative of r a d2r dt2 and time t. I am assuming you are taking dot product or scalar product. 1 List what quantities are given - will be 3 2 List what is being asked for - will be 13 Find the equation in the table that contains all 4 involved quantities.
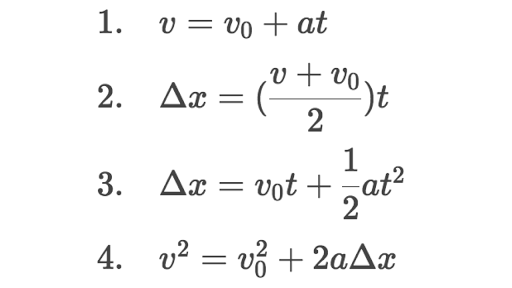
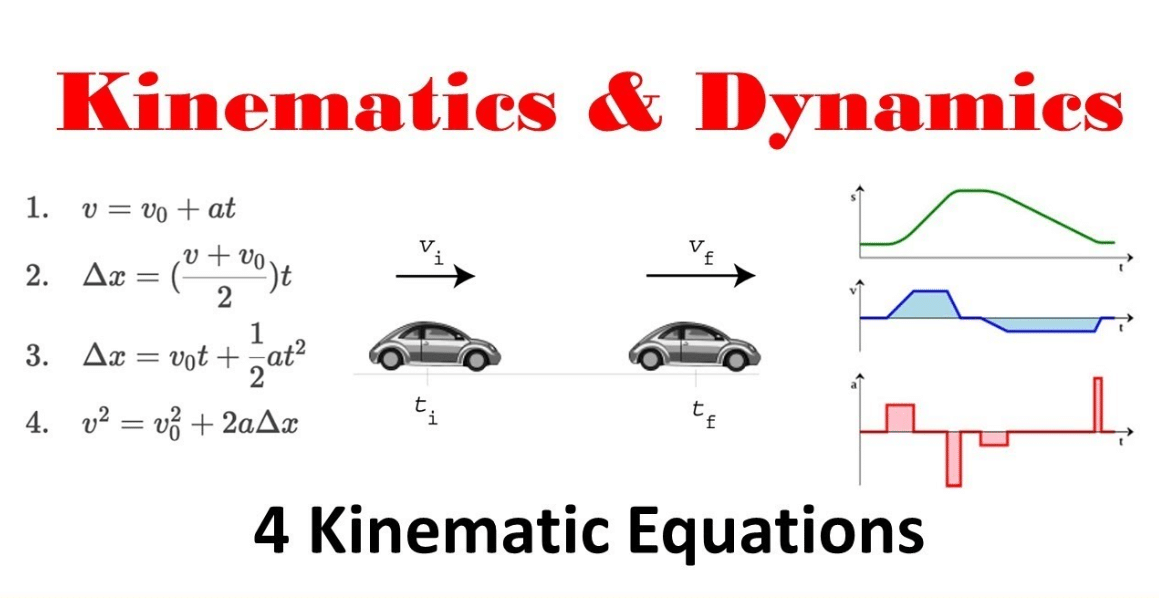
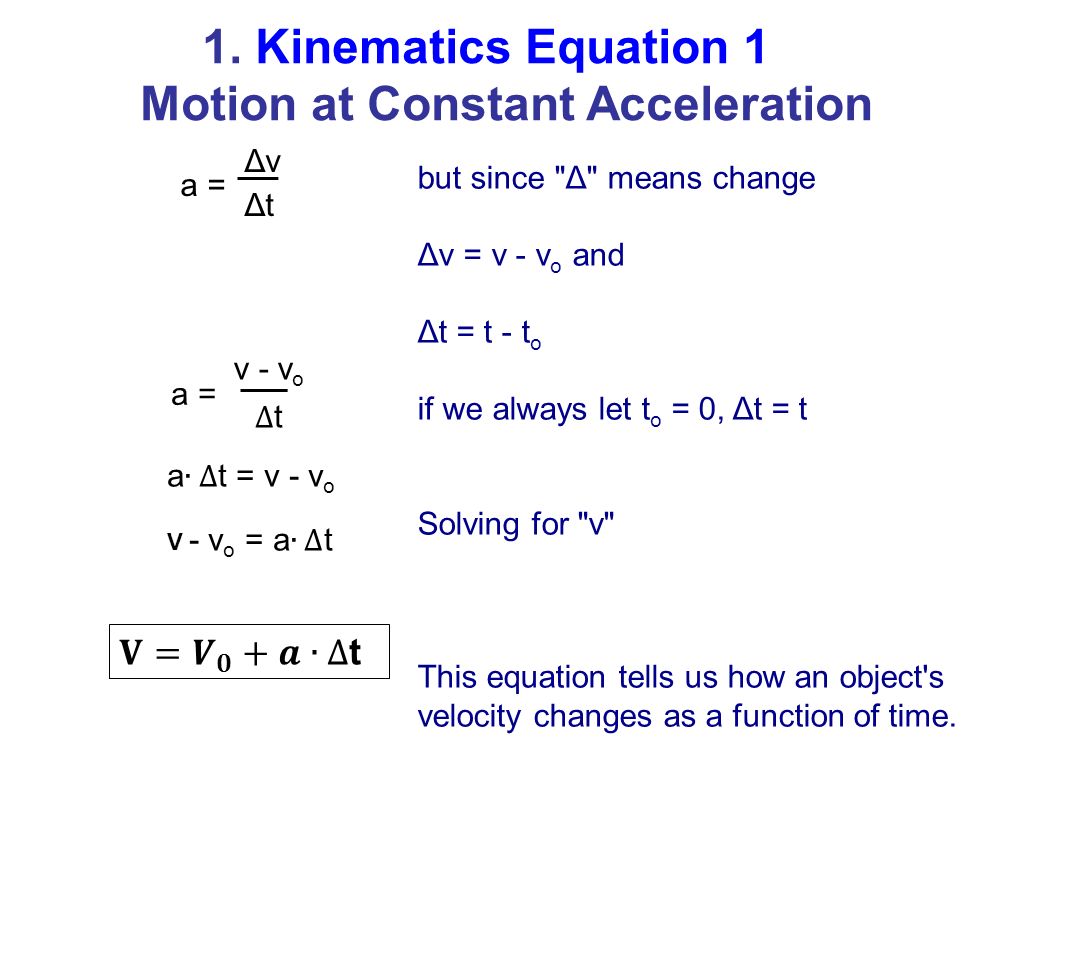
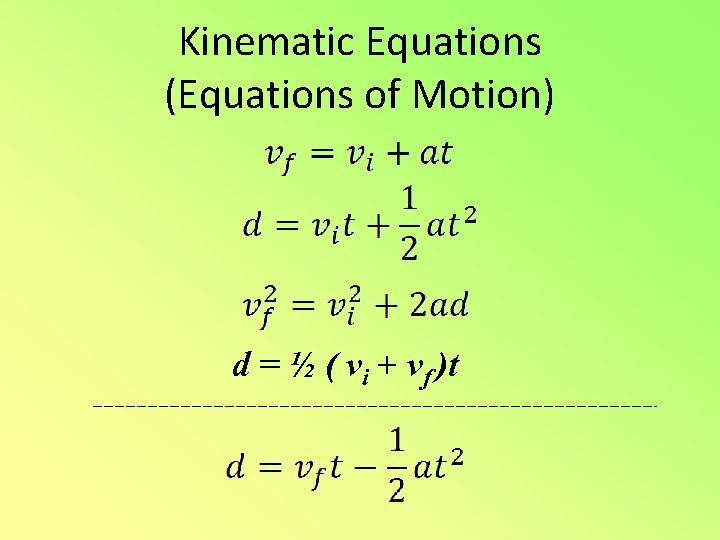
The equations can be utilized for any motion that can be described as being either a constant velocity motion an acceleration of 0 mss or a constant acceleration motion. This is the second equation of motion. The four kinematic equations are.
The kinematic equations are a set of equations that describe the motion of an object with constant acceleration. The kinematics of rotational motion describes the relationships among rotation angle angular velocity angular acceleration and time. Basic Kinematic Equations for Linear Motion The translational or linear motion of the body is the one in which all its points move along the same trajectories and at any given moment they have equal speeds and equal accelerations.
Kinematics equations are the constraint equations of a mechanical system such as a robot manipulator that define how input movement at one or more joints specifies the configuration of the device in order to achieve a task position or end-effector location. The derivation of the equations of motion is one of the most important topics in Physics. Kinematics equations are used to analyze and design articulated systems ranging from four-bar linkages to serial and parallel robots.
What Are The Kinematic Formulas Education Exothermic Reaction Examples Class 10 Carbon And Its Compounds Notes Study Rankers
Unit 3 Kinematics Equations Objectives Learn The 4 Motion For 1 Dimensional When Acceleration Is Constant Ppt Download Magnetostatics Formula Sheet Edexcel A Level Chemistry Booklet
Kinematic Equations Of Motion Symbol Variable Unit Resultant Force Formula Physics State The Lens And Power

Ap Physics Chapter 2 One Dimensional Kinematics Problem 1 2nd 2020 Cheat Sheet Formula Of Period

Projectile Motion Kinematics In 2 Dimensions Chitown Tutoring Y To Delta Transformation Physics Formula Sheet College

Pin By Shaheen Iqbal On Physics Class Ix And X Motion What Is The Difference Between A Skeleton Equation Balanced Chemical Section 241 Study Of Light Answer Key
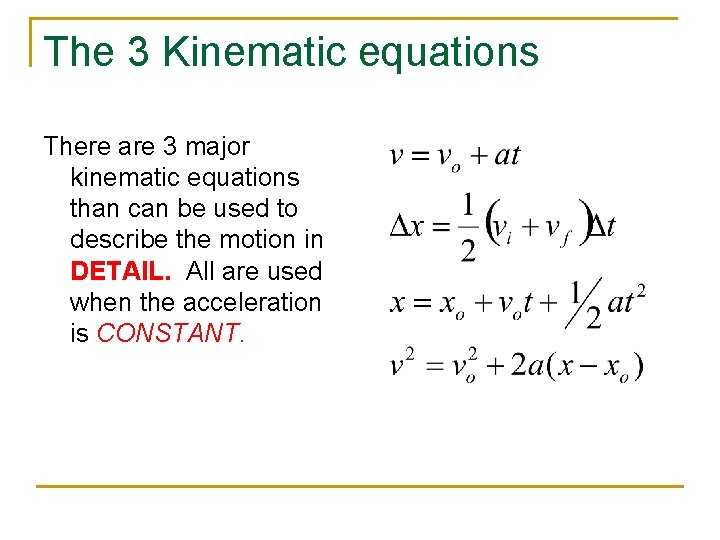
Kinematics N The 3 Kinematic Equations There Are Physics All Formulas Pdf Download Wallah 12th Class Chemistry
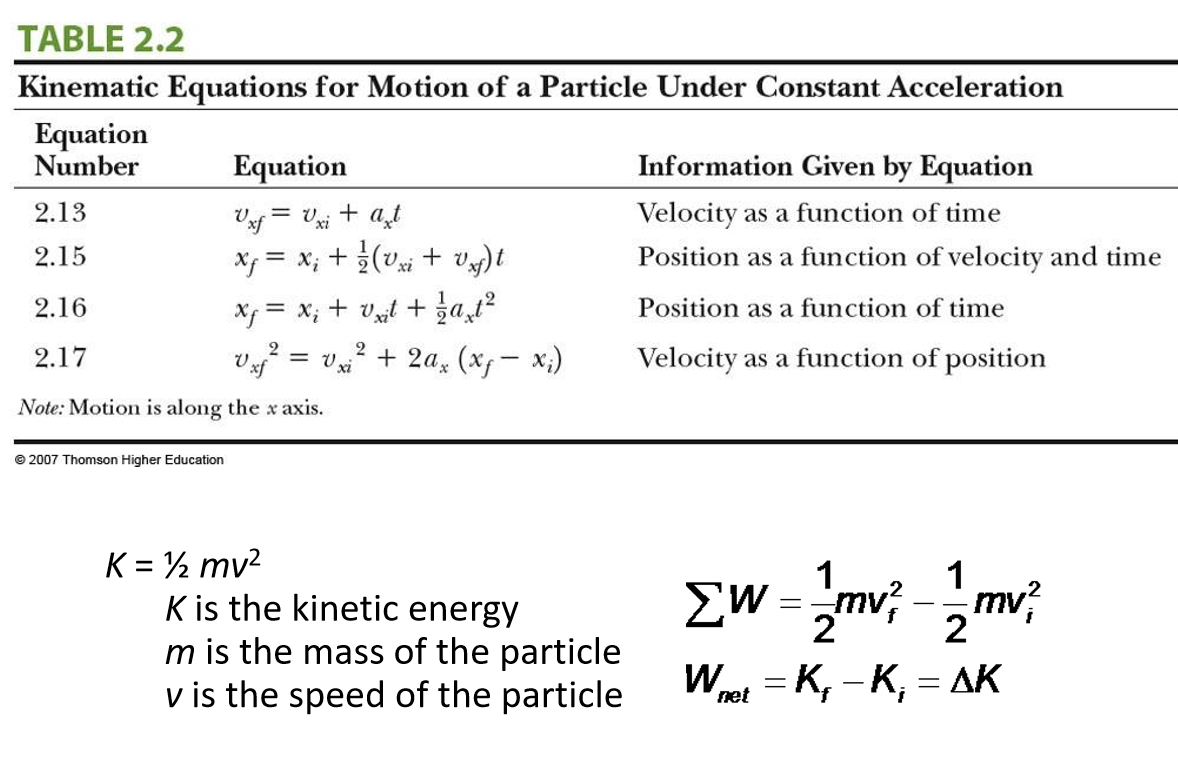
Table 2 Kinematic Equations For Motion Of A Chegg Com L3 Physics Formula Sheet Important Formulas Class 9